SophyAI Patented Platform




SophyAI Patented Platform

The SophyAI Artificial Intelligence platform with its 3 neural “engines” allows having in a single suite of A.I. functions of deep learning, georeferencing, and workflow. SophyAI allows applying the artificial intelligence to complex events that become usable, to the final user, in their classification and interpretation, making known and precise their spatial position and generating specific activities of information and active control that allow emulating the actions that a skilled human observer would do. This happens without solution of continuity. SophyAI doesn’t get tired and doesn’t get distracted.
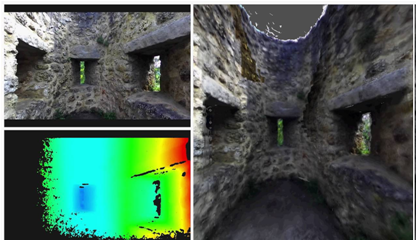
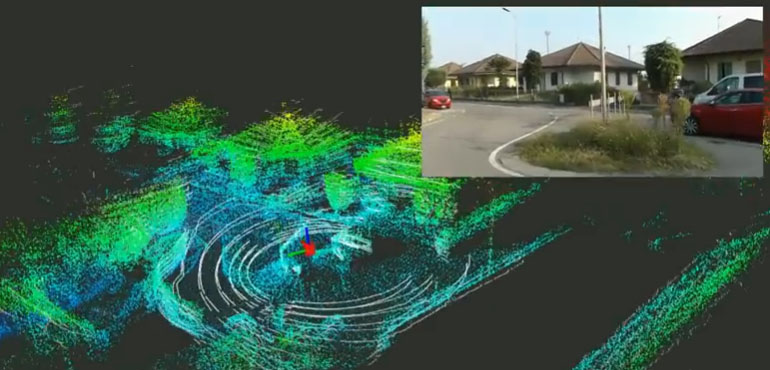
Realtime 3D reconstruction using SFM algorithms.
Localization and Mapping SLAM for 3D recostruction , realtime localization and obstacle advoidance. Typical application is autonomous navigation.

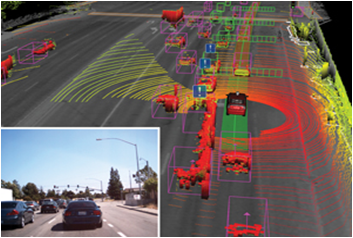
Machine Learning CNN technology for realtime video classification , localization and scenario description
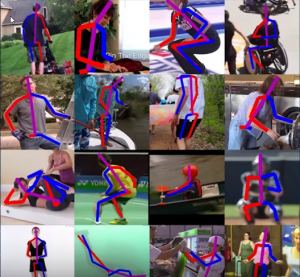
A.I realtime pose detection estimation .

A.I. realtime DPI detection .
Realtime geo localization of object view in the scenario by standard camera and classify by CNN neural network.
 Loading...
Loading...
 Based on the proven technology of aerial drones we developed a system of self-bathymetric survey that is unique in Italy. This technique involves the use of a small electric powered boat which is able, in a completely autonomous way, to “map” the bottom of lakes, rivers and harbors generating a three dimensional image of the conformation below the water surface.
Based on the proven technology of aerial drones we developed a system of self-bathymetric survey that is unique in Italy. This technique involves the use of a small electric powered boat which is able, in a completely autonomous way, to “map” the bottom of lakes, rivers and harbors generating a three dimensional image of the conformation below the water surface.

The data obtained will allow planners, geologists and other professionals to obtain a clear assessment of the state of the seabed with the aim to plan with greater precision and efficiency needed interventions.

The system is controlled by an artificial intelligence system that processes the information coming from satellites and intergrates them with the inertial sensors installed on board. Such processing capability makes it possible to do autonomous navigation and consequently to obtain an increase in accuracy and a sensitive reduction in the time of investigation. The operator, via a laptop computer determines the area of interest and traces the contours on a virtual map. The software then generates a grid of inspection on the basis of the data requested by the customer and sends the route to the boat that will perform the inspection sending real-time collected data and saving it on internal memory.
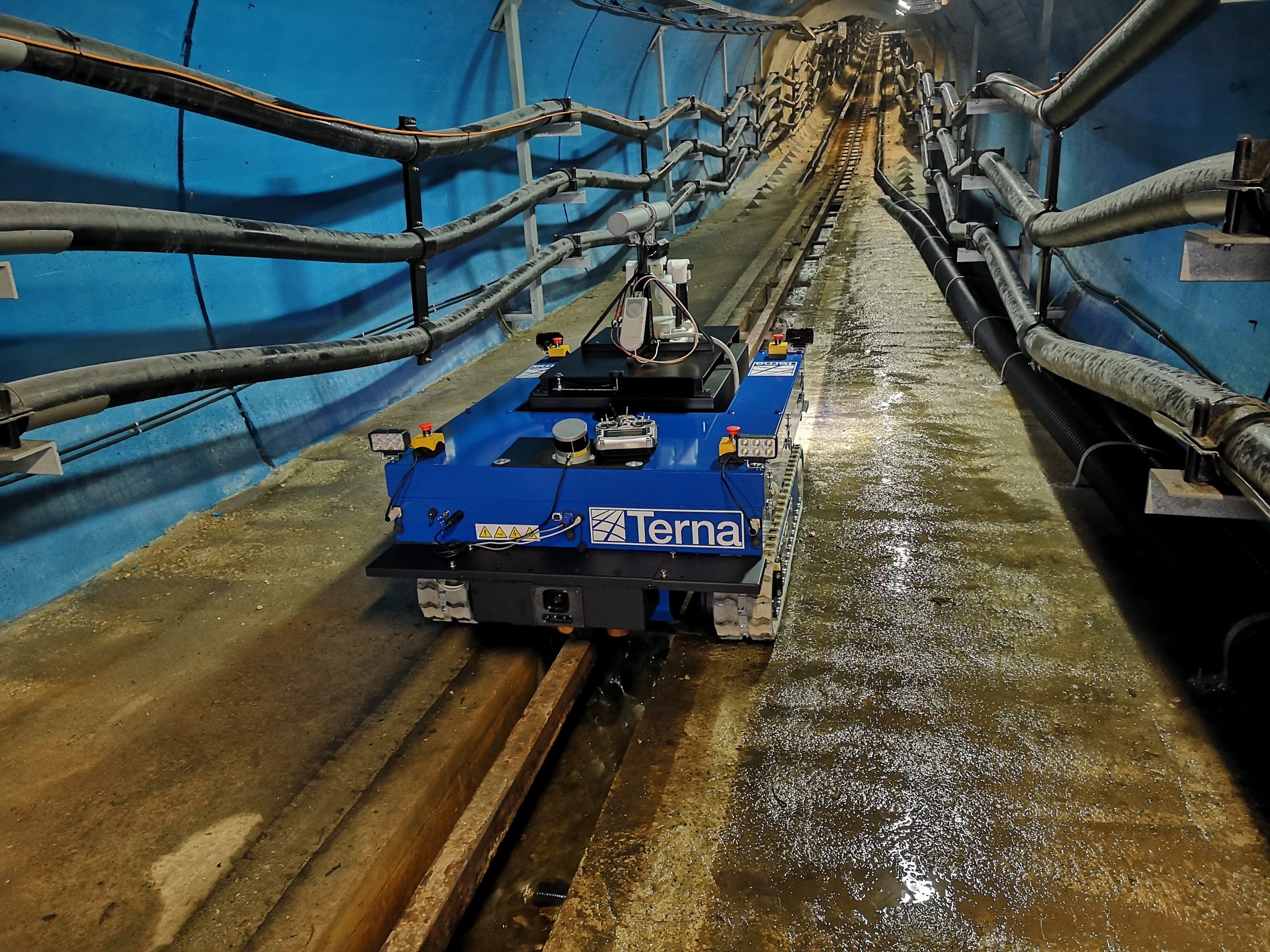
Our autonomous ROVERs for inspection in long tunnels, with a hostile environment and not covered by communication systems, are able to perform missions of several kilometers automatically managing the release of self-directing communication buoys. These allow the creation of a backbone connection that permits the ROVER to be remotely controlled in its handling and inspection task.