Buon pomeriggio,
volevo segnalarvi che la prossima settimana sarò presente all AI Week per presentare la nostra piattaforma brevettata SophyAI che supporta il Digital Twin , Robotica Mobile e Data Analytics attraverso i nostri Agenti AI.
Nel video qua sopra troverete un summary di quello che vi racconteremo nelle 2 giornate del 9 e del 10 Aprile a Rimini . La postazione di Laser Navigation dove potremo incontrarci è la 38 .
Vi aspetto . Buona Serata e Buona domenica a tutti.
History of the project
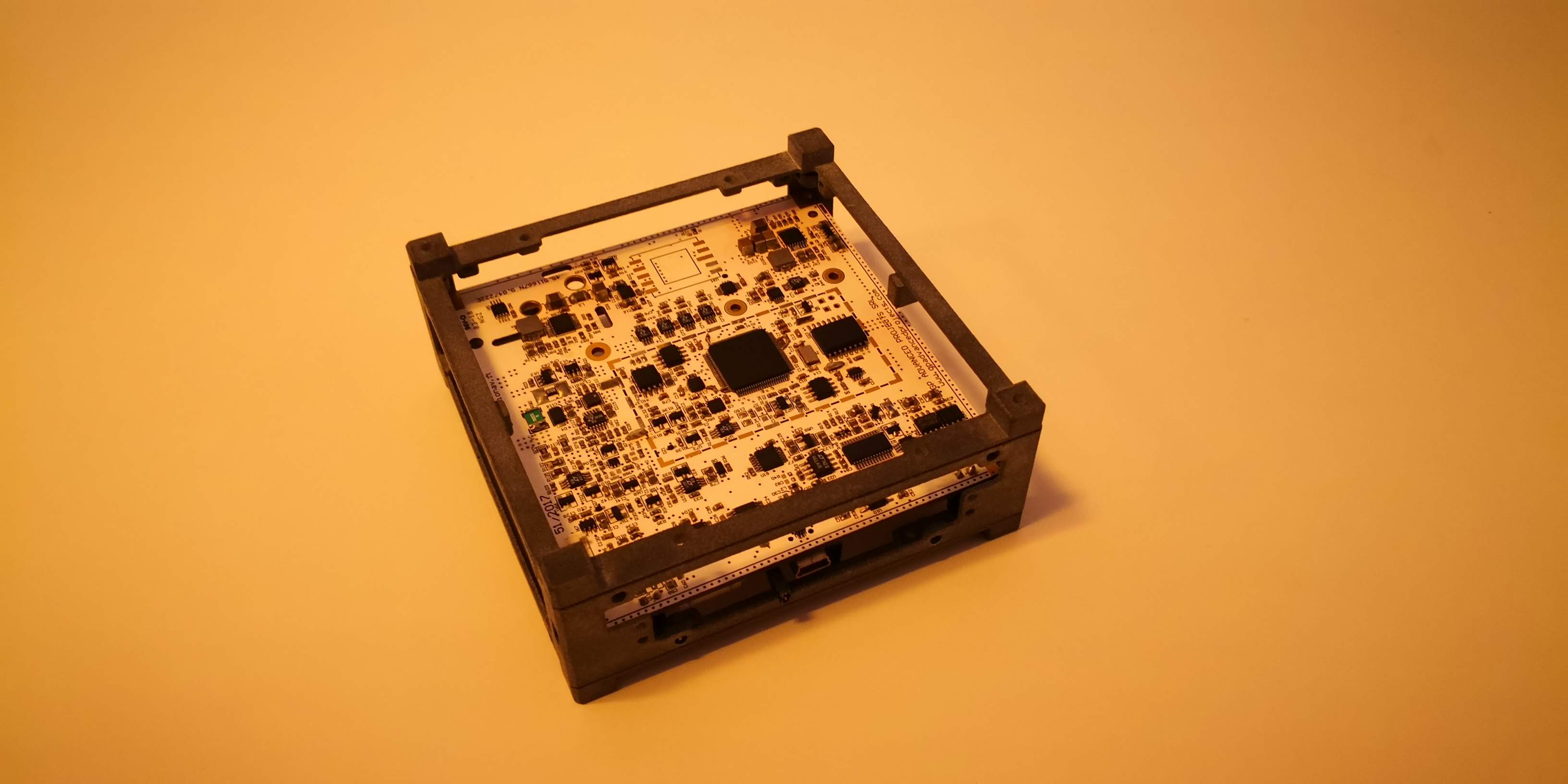
In 2016 Laser Navigation and GP Advanced Projects joined forces to create the first Italian commercial picosat. After more than 3 years of development thanks to the collaboration with, CESI, Linkit srl, Brno University of Technology, and the Polytechnic of Milan, the latter with its teachers and students we have created the first prototype, on which we will soon proceed with the tests needed to validate PicoSat before launch, scheduled for the first quarter of next year. The satellite will be launched on a synchronous orbit passing through the poles, and will make an orbit about every 90 minutes.
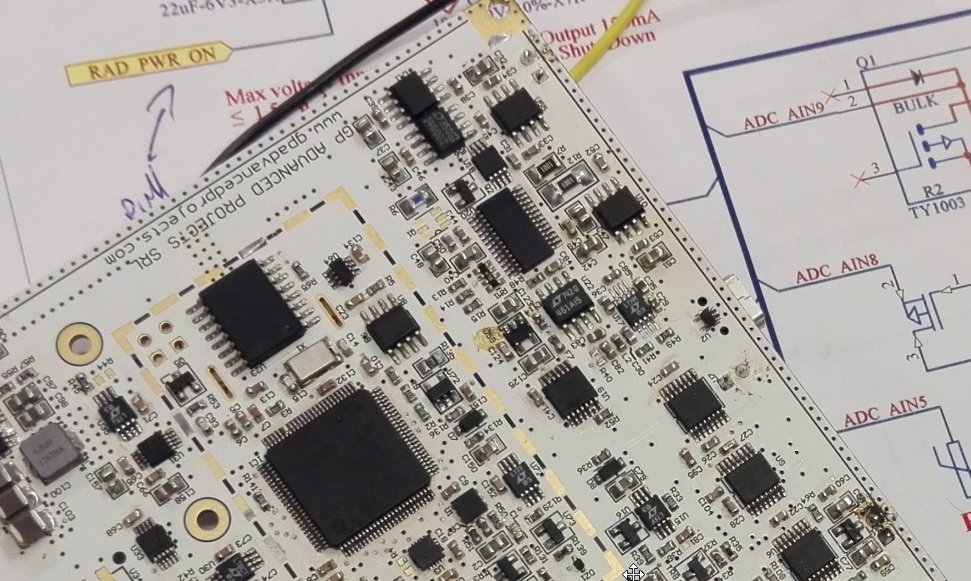
The cubesat FEES (Flexible Experimental Embedded Satellite) is based on a STM32F4 micro controller, the chosen operating system is ChibiOS and the development framework is derived from the Ardupilot opensource project, all features of the VR Brain, made by Laser Navigation, which was the board taken as the starting point to build the FEES main board, thanks to the indications and modifications provided by GP Advanced Projects. At the sensor level, it features an IMU that incorporates 3-axis gyroscopes and accelerometers, and a 3-axis magnetometer.
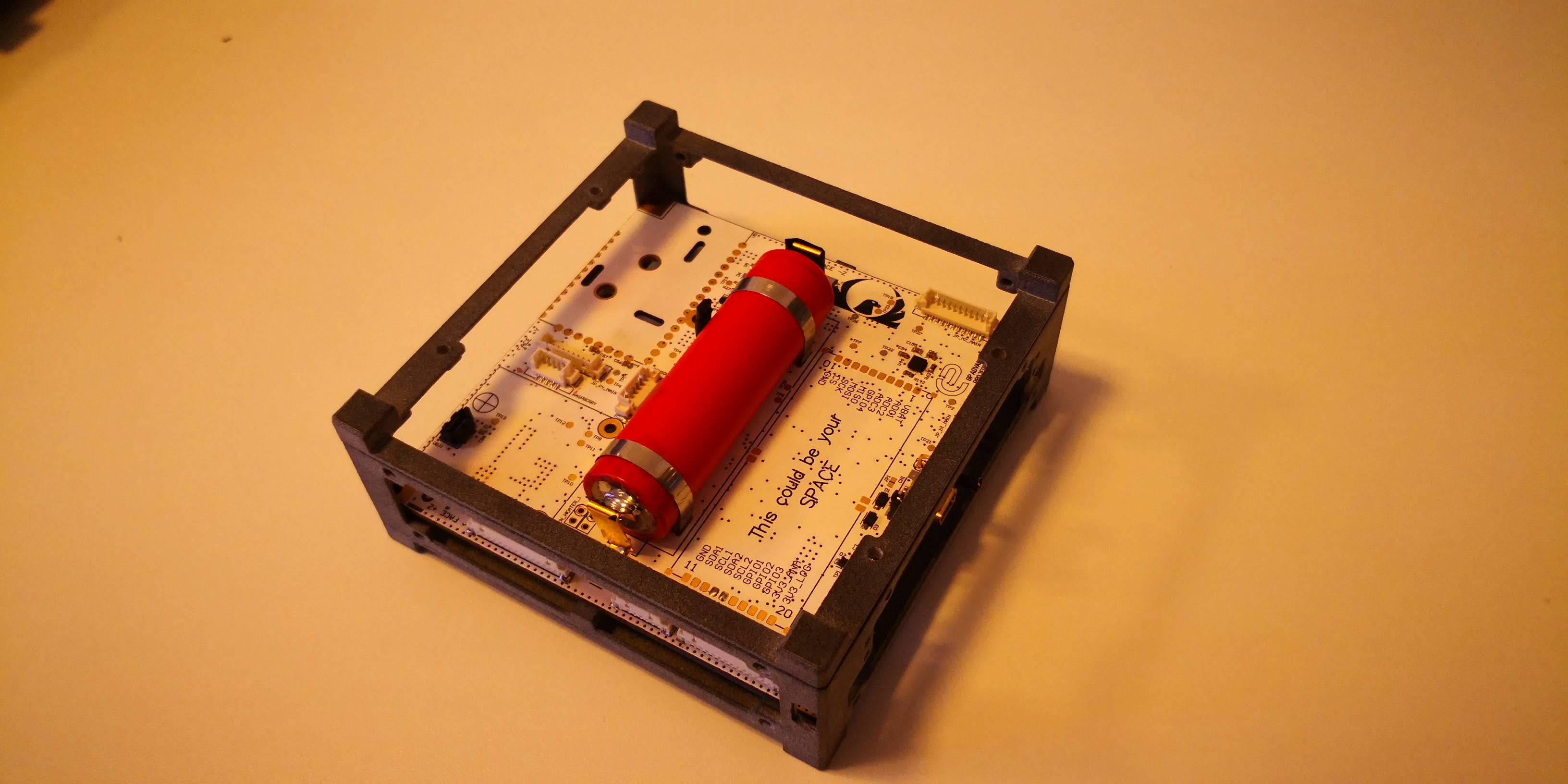
The system has an attitude system based on the use of magnetotorquer, which allow the pointing of the cubesat in the desired direction to optimize both the pointing of the edge antenna and the experimental camera mounted on the same.
The Payloads
The payloads mounted on board are the following:
An experiment (RadEX2) for the detection of the total radiation dose to which the cubesat is subjected during its stay in orbit, developed thanks to Jiří Hofman of Brno University of Technology.
An SDR system based on the Rasperry PI platform, capable of transmitting messages in SSTV and DVB-S format.
A LoRa telemetry system through a specially designed on-board modem, in collaboration with Linkit srl
A system for sending and receiving commands and basic telemetry thanks to short messages exchanged via Iridium satellite communication (to be confirmed based on current regulations)
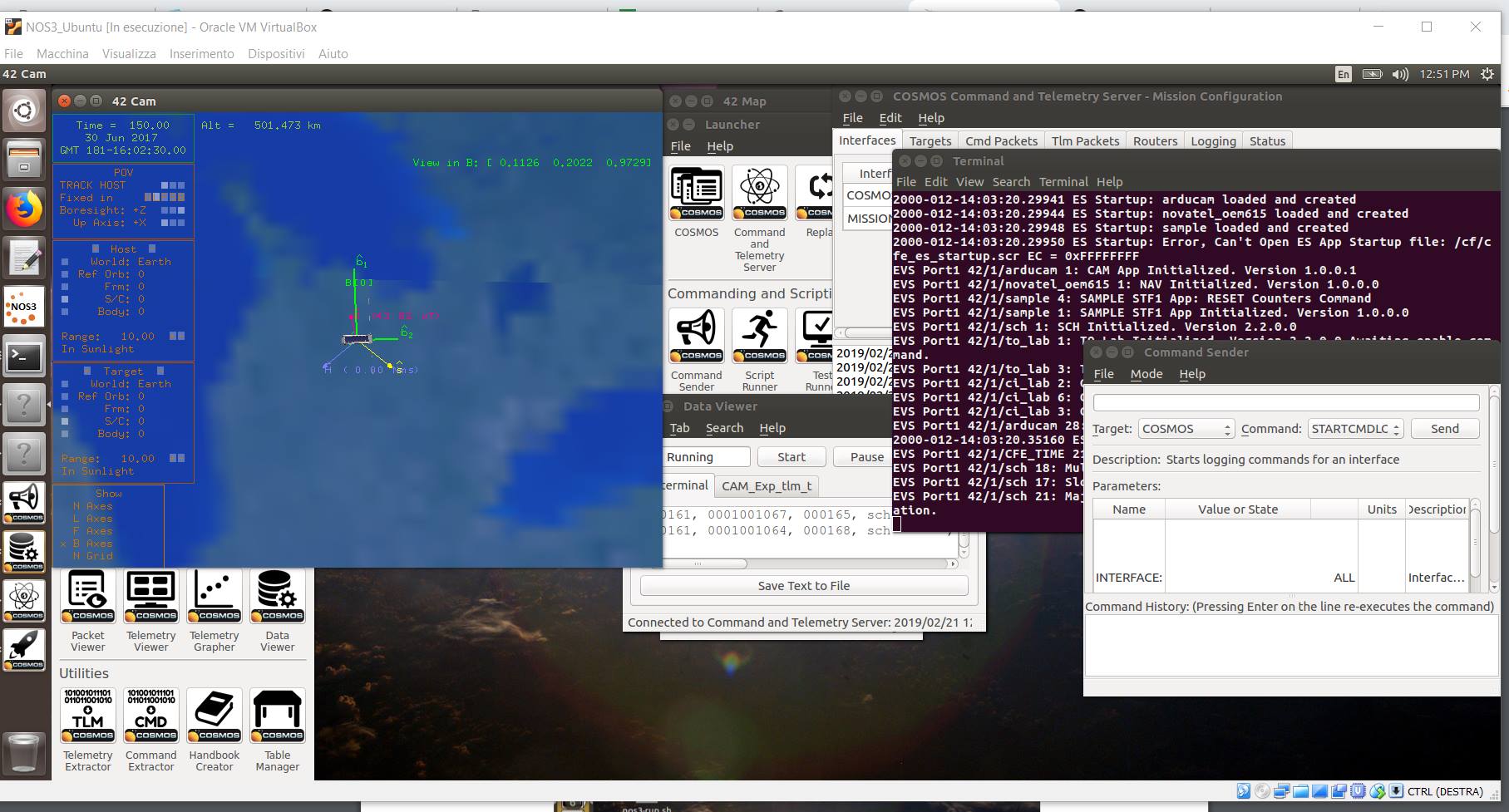
The development of the cubesat firmware is feverishly advancing, given the increasingly narrow margins that bring us closer to the time of launch, even using SITL simulation systems to facilitate satellite debugging in a terrestrial environment.
For the success of the project we are looking for resources to accelerate the writing and debugging of the code that have already had experience in the field of space software development.
Primary Goals :
In-orbit qualification of an attitude (meaning orientation and angular velocity) determination system. WHY? The attitude determination system, together with the control system, is one of the fundamental satellite components, and the basis for a future commercial platform.
In-orbit qualification of commercial GPS receivers. WHY? They are less expensive than space graded receivers, nevertheless allow to know with a reasonable precision the position on orbit. Ideal for nanosatellites.
Usage of the IRIDIUM global satellite network to receive data, supporting traditional radio transmissions. WHY? The IRIDIUM network allows to send/receive data in every part of the world, with a few second delay, without having to be in sight of a ground station, with obvious advantages for early warning needs (TBC).
Development of a ground station network, to receive FEES data. WHY? To download a big amount of data from a nanosatellite it is still necessary to rely on a network of ground stations which guarantees an adequate coverage. Developing it now means that it will be ready to be used by our next satellites.
Secondary Goals:
In-orbit qualification of an attitude control system. WHY? Attitude determination is useful, but even more is to use this information for attitude control, by using actuators and by following clear goals, such as to point toward the sun to recharge the batteries, or to point toward the ground to take pictures.
Testing of various transmission protocols by using Software Defined Radio (SDR) digital technology.WHY? By having a specific transceiver on board it is possible to modulate the signals in order to obtain different advantages, such as a longer transmission distance, or a higher download data rate. This will allow to identify the best solution for future missions needs. In this task FEES is supported by the radio-amateur and developer community.
To take picture by using a mini camera. WHY? Miniaturization allows to have on board a camera which sees in the visible spectrum, taking pictures which can be used for Earth imaging, but also to take pictures of the stars to determine satellite position with appropriate algorithms.
A platform for the Makers and radio amateur Community
Thanks to the Raspberry Pi based SDR, the satellite is a platform to experiment transmission protocols which are still not tested in space applications. The flexibility of the RPI solution allows the community to code the experiments in a familiar environment paving the way for the execution of very different test during the satellite lifetime.
Thanks to Ardupilot community we open a new space opportunity to open source flight control board after great success in drone development did in last 10 years.
Who’s behind F.E.E.S.
GP Advanced Projects srl has a strong know how in space systems and infrastructures, but also in system engineering and project management activities in general. In addition, the company has a proven experience in dealing with European companies, institutions, research bodies and space agencies, both European and non-European, and with launch providers.
The management responsibility of the FEES project belongs to GP Advanced Projects.
Laser Navigation srl is a company with a proven background of electronic devices design and development, in particular in the Unmanned Aerial Vehicle (drones) sector, where it develops autopilots and control systems. In additions Laser Navigation has a strong know-how in telecommunications and radiofrequency applications. Laser Navigations is in charge of the whole FEES electronics.
Politecnico di Milano is key actor in space activities, thanks to its participation to some of the most important European and non-European missions. Politecnico di Milano support FEES in analysis and design activities.
CESI is a European leader in the production of solar panel for space application. CESI provides the photovoltaic cells which generates the energy that FEES needs.
It is in charge of FEES TT&C module and ground station design.
The Brno University of Technology, and in particular the Faculty of Electrical Engineering and Communication, is in charge of designing the satellite radiation monitor.
Furthermore the FEES development is supported by the radio-amateur community for the Software Defined Radio (SDR) development and the ground station support.
Thanks to : Guido Parrisenti for the original idea , Stefano Ampolo and Luca Micheletti , for video animation and FEES coding , Diego Ambroggi for schematics and PCB design.
FEES. needs
The FEES projects is completely self-financed. The launch has already been purchased and launch date scheduled.
To mitigate internal development cost and to increase the mission success probability, GP Advanced Projects is looking for companies and institutions willing to sponsor FEES, or to participate to the projects in various ways.
More detail about public github with detailed board information and firmware well be available in the next weeks.
Best
Roberto Navoni
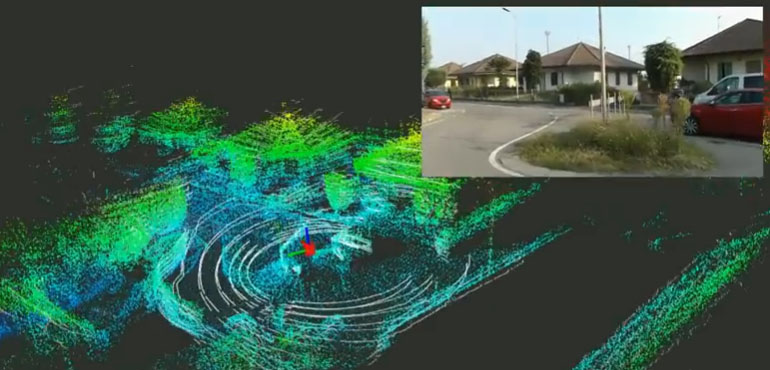
In this video you can see a prototype of our experimental drone set up with a companion computer and an advanced lidar system during the checks of the anti-collision system that working simultaneously with the localization and mapping algorithms allows the drone to avoid obstacles during autonomous flight .In the last 5 years in the Laser Lab, localization, mapping and anti-collision algorithms have been developed, using 2D and 3D type lidar.In this first part of the post we will focus on algorithms using a 2D lidar and a 2D SLAM navigation algorithm.
The videos of the playlist are made using:
Custom Drones.
VR Brain 5.2.
Companion Computer with the ROS operating system installed and our algorithms for calculating position and mapping in real time to build the map of the navigation area.
The outputs of the navigation system are:
Metric coordinates X, Y with the starting point set at the point of ignition of the system.
Angle representing the direction of the robot’s or drone’s bow.
Map of occupation of the navigation area reconstructed in real time in 2D, the height is given by the height value returned from the barometer of VR Brain 5.2
In the following video we tested the SLAM algorithms in the corridors and the offices of our laboratories , the quality , accuracy and repetition of the location was reliable and allows to implement excellent autonomous navigation algorithms without GPS and with anti collision, as we will show in the following examples.
After the excellent results obtained in the ground tests we carried out the tests in flight by installing the localization system on board of our drone injecting the location data instead of the signal normally sent to the VR Brain 5.2 from the GPS, in addition to the position signal provided from the on-board computer we have also interposed the heading direction data generated by the navigation algorithm to the autopilot in place of the data provided by the magnetometer. The magnetometer has been replaced because in indoor areas the perturbation of the magnetic field is such as to compromise the navigation system making it unstable.
In the video you can appreciate the quality and accuracy of the location, the accuracy of the heading direction and the low latency of the calculation algorithms for localization and mapping.
The height data is given by the barometer and recurrent by the on-board accelerometers of the VR Brain 5.2.
In the next video we see an example of the flight telemetry of an autonomous mission inside a boiler, the environment is a metallic environment where the position could not be provided through a traditional GPS, the only possible option it was set up a drone able to navigate autonomously thanks to the help of a system of localization and mapping based on a laser system.
Now a couple of examples of application , the first flight was a video inspection on a vertical wall , the flight planning did on the ground station sent to the drone and the flight did independently without pilot.
On the next flight, instead, an example of a horizontal inspection flight.
The Lilium Jet – very cool!
The world’s first elecric vertical take-off and landing jet. It has a top speed of 300 km/h and a range of 300 km
For more info see the website of company at : https://lilium.com/
After a few months without important hardware news on our glorious VR Brain 5 Autopilot, here we finally arrived at the moment of truth after almost 10 years since the first VR 8-bit Brain, the Multipilot was the name of our first autopilot , today here is the first VR Brain IX power on , a monster of power with so much potential to explore, thanks to the new firmware Ardupilot that has made giant steps compared to the early code versions.
The future is here after over two years of work can be said to have developed in the laboratories of Laser Navigation and thanks to the support of the network of laboratories Virtualrobotix drone technology of tomorrow.
A short video of a recent test test of our system of autonomous flight, mapping and advanced management of the payload.
In the video you can see to your left the management of telemetry and live images from the drone, during production of photogrammetry high definition of this shed, on the right instead you can see the anti collision system , mapping and location on board the drone, working in 3D mode, totally alternative to the GPS with an accuracy of 5 cm. Integrated into our flight control.
The system is able through modules VR SLAM and Payload managment to fully manage a mapping mission indoors and inspection giving results very impressive.
The localization module that we have implemented is fully compatible with automated features that normally are handled with GPS. So in fact allows both the flight assisted by Lidar that autonomous navigation with impressive precision than a standard GPS.
This new architecture named VR Goliath it is compatible with different types of frames is that copter trad hely, but also boat or plane depending on the component and makes’ the supply to professional customers and advanced R & D. Soon we are planning at the Technical University of Padua, a faculty Aerospace Professional Seminar dedicated to students, researchers and High Tech companies where they will present the results of these research activities and will experience first hand the latest innovations born out by our lab … . different professional customers have begun to use these technologies and our feedback from the field in real situations have confirmed the quality tested in our laboratories. To access more information on the platform you can contact me at r.navoni@virtualrobotix.com .
In October 2018, Laser navigation was the overall winner of the Business Meets Innovation contest, promoted by the Italian-German Chamber of Commerce. Five top players in the Italian-German business community, Robert Bosch, Calcestruzzi, MAN Truck & Bus Italia, Rödl & Partner and Siemens, decided to focus on the innovative contribution of an SME to the development and implementation of nine strategic projects for its business.
Laser navigation got in to the finals with two projects, in a successive session, the five Top Players elected Laser navigation as the overall winner of the contest.
 SophyAI Digital Twins
SophyAI Digital Twins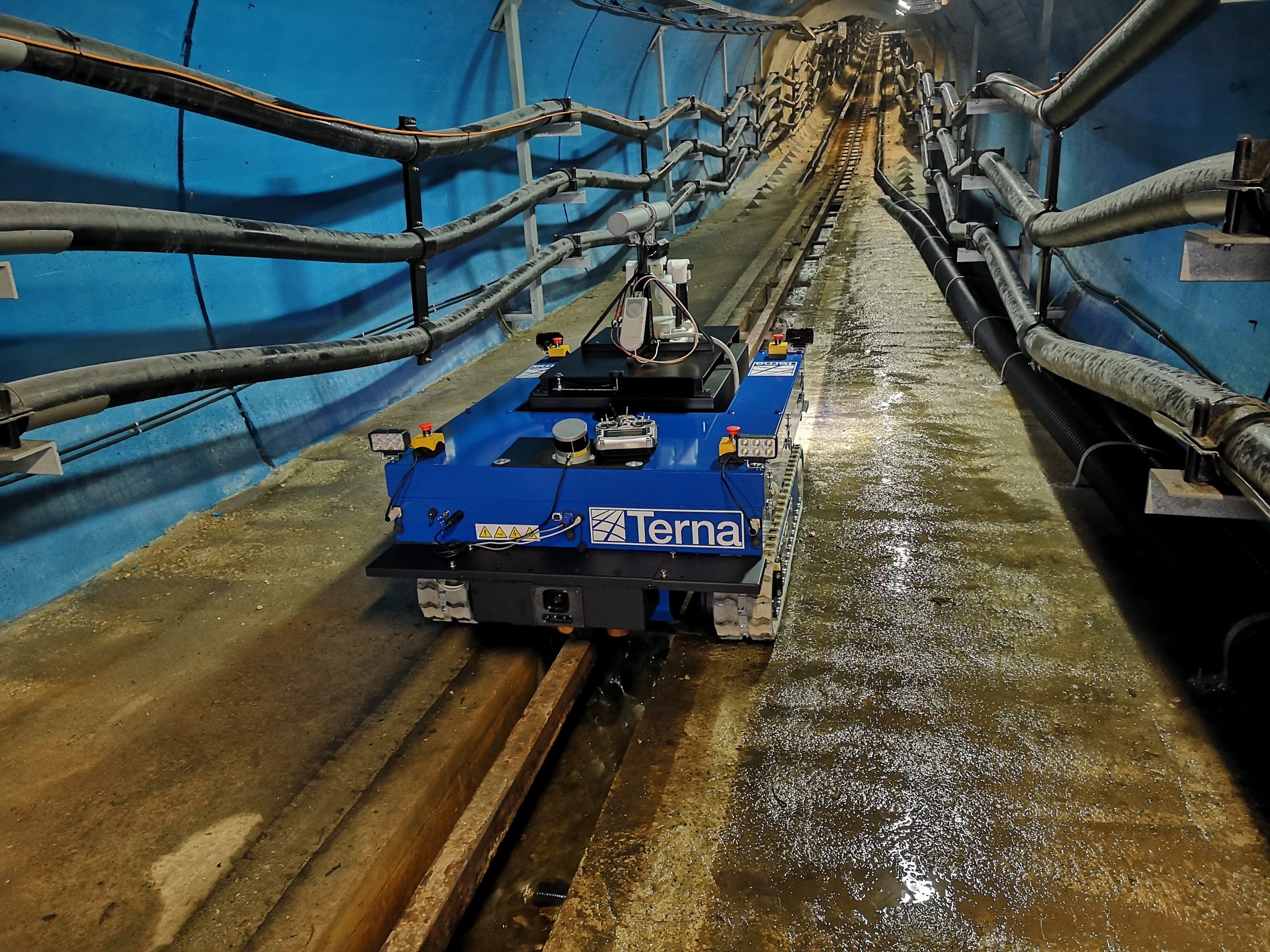 VR ROVER 5.0 PRO
VR ROVER 5.0 PRO VR TRACTOR 5.0
VR TRACTOR 5.0 VR AXEL ROVER
VR AXEL ROVER SophyAI Mobile Anti Collision System
SophyAI Mobile Anti Collision System Autonomous Robot Buoy
Autonomous Robot Buoy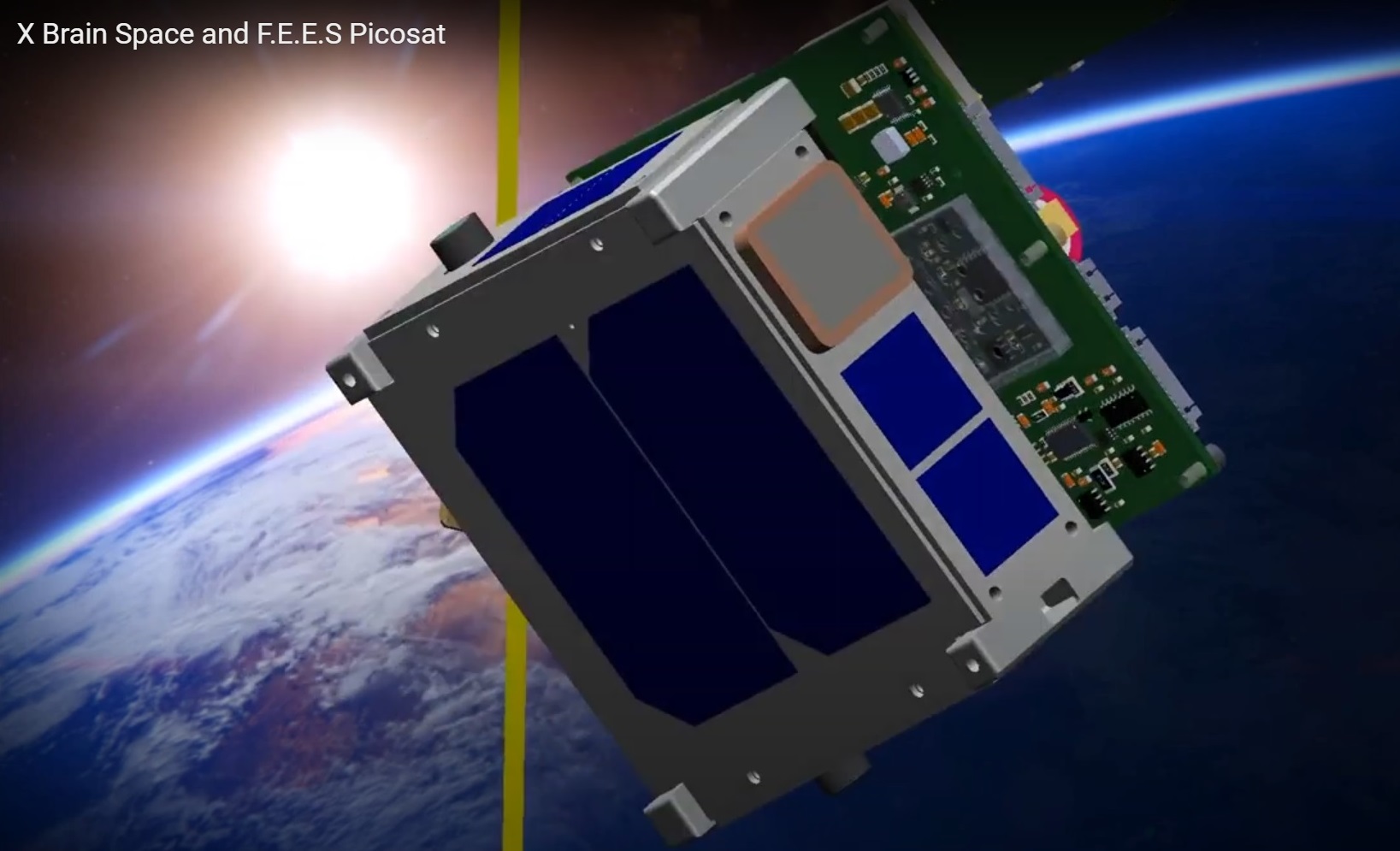 SophyAI Space
SophyAI Space