Buon pomeriggio,
volevo segnalarvi che la prossima settimana sarò presente all AI Week per presentare la nostra piattaforma brevettata SophyAI che supporta il Digital Twin , Robotica Mobile e Data Analytics attraverso i nostri Agenti AI.
Nel video qua sopra troverete un summary di quello che vi racconteremo nelle 2 giornate del 9 e del 10 Aprile a Rimini . La postazione di Laser Navigation dove potremo incontrarci è la 38 .
Vi aspetto . Buona Serata e Buona domenica a tutti.
Laser Navigation is proud to announce that it has joined NVIDIA Metropolis, a partner program focused on bringing to market a new generation of vision AI applications. NVIDIA Metropolis nurtures a rich ecosystem and offers powerful developer tools to supercharge vision AI applications that are designed to make the world’s most important spaces and operations safer and more efficient.
For us, this is an important breakthrough that will allow us to be integrated in a global and premium context, devoted to the optimal use and development of artificial intelligence applied to images and their analysis. We have appreciated over the years the quality and evolution that NVIDIA has brought to its processing modules, and we can well say that the totality of our projects for important clients would not have been as successful as they were without the use of the computational elements of the NVIDIA Jetson edge AI platform.
Their compact size and computing power have been the winning key for all on-site installations, and the easy remote configuration of the devices has enabled us to drastically reduce installation time with customers using our patented SophyAI® platform.
Laser Navigation is an innovative SME with high tech expertise. Our business focuses on robotic design and implementation and artificial intelligence applied to vision. Four years ago, we developed and patented a modular A.I. platform called SophyAI®, which is extremely versatile and scalable, and in which three modules are integrated, an inference module, a geolocation module with automatic creation of digital twin of the “observed,” and a configurable workflow module to allow the customer having an integrated solution without adding other interpretive tools. NVIDIA Jetson has been, since the beginning, our best choice for computational processes.
SophyAI® applications are devoted to monitoring worker safety in complex environments, managing our robotic realizations, and more. See more about us at www.lasernavigation.it
SophyAI® has made itself known:
Chosen by Open Italy for a joint trial with TERNA (2022)
Winners of ENI’s Call For Safety 2021
Among the 10 Selected by Open Italy’s Demo Day 2021
Winners of the Innovation Day of RINA 2020
Selected by the 2019 California Incubator (SophyAI for Digital Twin) Plug and Play
Innovation Award 2019 (Autonomous Tractor) Verona Agricultural Fair
Overall Winner 2018 of Business Meets Innovation (Bosch Smart city , Calcestruzzi Industrial Safety and Security )
The NVIDIA Jetson edge AI platform is present in all our robotic realizations and is the core elaboration system of our SophyAI® A.I. platform.
A wide range of AI applications powered by NVIDIA technologies
NVIDIA Metropolis makes it easier and more cost effective for enterprises, governments, and integration partners to leverage world-class AI-enabled solutions to improve critical operational efficiency and safety problems. The NVIDIA Metropolis ecosystem contains a large and growing breadth of members who are investing in the most advanced AI techniques and most efficient deployment platforms and using an enterprise-class approach to their solutions. Members can gain early access to NVIDIA platform updates to further enhance and accelerate their AI application development efforts. Further, the program offers the opportunity for members to collaborate with industry-leading experts and other AI-driven organizations.
By joining Metropolis we expect to expand the platform’s capabilities to additional application fields. Being welcomed by the NVIDIA Metropolis Partner Program, beyond being honored, will allow us to access not only NVIDIA’s cutting-edge technology but also to be able to network with other partners and contribute to the growth of this great ecosystem.
Buongiorno #elis ha pubblicato sul suo canale youtube gli interventi legati alla premiazione delle startup e pmi innovative invitate all’evento #openitaly . Tra le aziende premiate è presente Laser Navigation l’azienda di cui sono CEO in un progetto realizzato sui bisogni di Terna SPA basato sul nostro sistema brevettato di intelligenza artificiale SophyAI . Segue il video integrale dell’intervento , grazie ai colleghi di Terna e di Elis per questa opportunità:
(LaPresse) – La galleria della Maddalena situata a Chiomonte (Torino) è il principale cantiere italiano della nuova linea ferroviaria Torino-Lione.Nasce come cunicolo geognostico utile per fornire le informazioni geologiche necessarieper Lo scavo de ltunnel dibase sul versante italiano. TELT è il promotore pubblico binazionale incaricato della realizzazione e gestione della linea Alta Velocità/AltaCapacità progettata sotto le Alpi tra Torino e Lione, una grande infrastruttura parte della Rete Transeuropea dei Trasporti (TEN-T), l’ambiziosa iniziativa dell’Unione Europea per connettere le reti ferroviarie, porti, aeroporti e interporti e aumentare la quota di persone e merci che viaggiano su rotaia anziché su strada. L’approvazione della Variante di cantierizzazione prevede che lo scavo del tunnel di base venga realizzato partendo da Chiomonte e non da Susa, pertanto, oggi Webuild sta realizzando 22 nicchie d’interscambio in modo da adattare la galleria al passaggio dei mezzi di cantiere. Le nicchie, viste le ridotte dimensioni del cunicolo, sarannolunghe da 30 a 65 metri, profonde circa 4.50 metri e consentiranno ai mezzi di incrociarsi in sicurezza. Verranno scavate con metodo tradizionale nell’arco di 20 mesi e saranno utilizzate per l’accesso di servizio per veicoli e attrezzature che opereranno nel cantiere del tunnel di base. Per poter realizzare l’esplorazione degli ultimi tre km di galleria e quindi dotare il cunicolo dei necessari sistemi di luci, di ventilazione e altri dispositivi utili per far lavorare le maestranze in sicurezza, Webuild con CIM (Competence Industry Manufacturing 4.0, uno dei principali Competence Center tecnologici italiani), ha creato Axel il primo robot utilizzato nei cantieri per sostituirsi all’uomo per l’attività di esplorazione di tunneling. Axel permetterà per la prima volta in Italia di svolgere in remoto tutte quelle attività propedeutiche alloscavo a maggior rischio sicurezza dei lavoratori.
Buongiorno a tutti,
dopo 3 mesi di sperimentazione operativa la nostra piattaforma di formazione a distanza ed LMS ( Learning Managment System ) ha iniziato ufficialmente la fase di beta testing.
Durante la fase alfa abbiamo fornito servizi di formazione a distanza a scuole primarie , secondorie , università e associazioni che durante il periodo di lock down si sono trovate impreparate nella fase immediatamente successiva alla chiusura totale delle scuole e delle attività di formazione in aula. Grazie alla nostra tecnologia stiamo gestendo più di un migliaio di utenti contemporanei su nostre piattaforme con picchi fino a 5-6000 utenti giornalieri . Queste sono le dimensioni di questa nostra sperimentazione , inoltre la nostra architettura è stata adottata anche da prestigiose università che sono riuscite ad erogare formazioni online contemporanea fino a 16’000 utenti. Tutto questo grazie ad un mix di tecnologie opensource , di cloud e competenza nella gestione di flussi video protocolli e sistemi a bassa latenza dimensionati per gestire un numero molto elevato di contemporaneità.
Un video che racconta l’evento Coder Dojo Live , dove 350 Ninja ( giovani partecipanti ) e 40 mentor hanno utilizzato la piattaforma per imparare tecniche di coding con : scratch , App Inventor , Microbit , Minetest ( Un clone opensource di minecraft ) e Python combat.
In questi mesi abbiamo implementato un sistema che rispondesse alle esigenze più comuni della FAD ( formazione a distanza ) sia a livello scolastico che a livello di formazione professionale. Il risultato è un complesso sistema di creazione di room virtuali dove è possibile implementare corsi , registrare i log dei partecipanti che fruiscono delle lezioni , registrare i video delle lezioni e organizzare complessi corsi con decine di docenti all’intero di classi virtuali , ma presto anche all’interno di classi fisiche.
Particolare attenzione è stata data all’aspetto dei laboratori per renderli interoperabili con le classi virtuali . Nella roadmap di sviluppo dei prossimi mesi è inoltre prevista la possibilità di implementare l’inter operazione tra classi fisiche e classi virtuali uno degli scenari che riteniamo possibile per i mesi a venire a cui la scuola dovrà essere pronta anche alla gestione di una didattica mista in aula e in formazione a distanza allo stesso tempo.
Segue un documento riassuntivo delle principali funzionalità del sistema nella sua revisione 3.0 .
Per maggiori informazioni inviate una mail di richiesta a r.navoni@virtualrobotix.com
After several months of development, we successfully presented our latest creation at the Verona Agricultural Fair: a latest-generation mini-tractor, developed in collaboration with our customer MDB, piloted by our Artificial Intelligence platform SophyAI. The vehicle won the prize for innovation at the Verona Agricultural Fair. The tractor is equipped with one of our VRBRain X PRO autopilot connected via LTE 4G network (in the future 5G) to the internet with double HD camera, VR GPS X and double antenna, for route estimation, with sub metric RTK precision as well as a front and rear anti-collision system, based on 3D Realsense technology. The entire complex orientation and handling system is controlled and managed by SophyAI, which allows the vehicle to have a remote assisted or fully automatic operation. The mini tractor will be first used in agriculture for operations between rows, where high operating precision is required, without human presence, when chemical compounds are sprayed.
La Call for Innovation lanciata da RINA è dedicata al tema della Augmented Inspection, ovvero allo studio di tecniche e soluzioni innovative pensate per le ispezioni. Ai partecipanti è stato chiesto di proporre servizi e strumenti dedicati alla raccolta dati e alla creazione di analisi predittive, in grado di ottimizzare i processi produttivi e di manutenzione.
Per la Call for Innovation Augumented Inspection sono state individuate più di 170 imprese; alla fine del processo di selezione, basato sulla valutazione delle proposte presentate in termini di innovazione e potenziale, sono state individuate dodici finaliste.
In occasione dell’Innovation Day, le aziende selezionate (The Tactigon, Archon, DRB, LinUp, Kuaternion, Alleantia, New Generation Sensors, ENERSEM, High Performance Analytics, Circle Garage, MTM Project e 221e) hanno potuto presentare in prima persona i loro progetti davanti alla giuria, composta dal top management di RINA, Microsoft Italia e Digital Magics, che ha scelto la start up a più alto potenziale per le necessità e gli obiettivi strategici della società.
Ad aggiudicarsi il riconoscimento è stata Archon con il suo progetto SofyAI, una piattaforma di Intelligenza Artificiale per la gestione e la riduzione del rischio in ambiti fisici complessi, in particolare nella gestione della safety e della security di impianti industriali.
RINA supporterà economicamente Archon per lo sviluppo del servizio e della tecnologia proposti e nella sua integrazione nella offering di Gruppo; RINA offrirà anche un concreto aiuto in termini di business development.
“All’interno del nostro percorso di innovazione abbiamo pensato di aprire le porte dell’azienda al mondo delle startup e PMI italiane. Lo abbiamo fatto perché abbiamo raccolto le esigenze dei nostri clienti, attuali e futuri, di avere nuove tecnologie e nuove soluzioni per estrarre ancora più valore dai dati a disposizione”, ha detto ad Affaritaliani.it Giosuè Vezzuto, Chief Digital Officer di RINA.
“Rina applica le proprie competenze ingegneristiche per offrire possibilità di analizzare e predire il funzionamento dei vari asset in giro per il mondo.
Abbiamo scelto Archon per la novità dell’idea e per la contiguità con il nostro business; soprattutto, il driver più importante è stato l’immediatezza e la velocità con la quale potremo proporre la soluzione presentata da Archon”.
“La democratizzazione della tecnologia è per noi un aspetto fondamentale – ha continuato Vezzuto -. Rina ha sempre sottolineato l’importanza delle idee, indipendentemente da dove queste nascessero: sia all’interno che all’esterno dell’azienda”.
Vezzuto ha poi sottolineato come quello di RINA per fare innovazione sia un modello aperto, inclusivo e collaborativo “Per questo ci proponiamo come partner industriale per le startup, contribuendo alla loro crescita grazie alle nostre competenze, conoscenza dei mercati e capacità di delivery”.
VIDEO – Vezzuto, RINA: “Apriamo alle startup per rispondere alle esigenze dei clienti”
“La piattaforma che abbiamo presentato oggi l’abbiamo sviluppata negli ultimi tre anni. Ha già avuto nel suo primo anno di vita una decina di clienti industriali importanti”, ha detto ad Affaritaliani.itRoberto Navoni, CEO di Archon. “L’obiettivo è quello di realizzare un sistema di intelligenza artificiale in grado di contenere i rischi in ambito industriale, in particolare nel settore della sicurezza dei lavoratori.
L’idea è usare algoritmi molto complessi all’interno di un’industria e quindi applicare un’altissima tecnologia per capire che cosa succede in un’azienda. Penso che per RINA il tema della sicurezza sia molto importante”.
VIDEO – Navoni, Archon: “Usiamo AI per contenere i rischi in ambito industriale”
Layla Pavone, Chief Innovation Marketing e Communication Officer di Digital Magics, ha dichiarato: ”Siamo davvero orgogliosi dei risultati raggiunti con questa Call For Innovation, grazie alla partnership con RINA, un’azienda che rappresenta l’eccellenza nel settore a livello internazionale e con la quale siamo stati fieri di collaborare. Il commitment di Rina in termini di apertura all’innovazione per linee esterne è, a mio avviso, un esempio per molte aziende che ancora non hanno beneficiato di questa importante opportunità offerta dall’ecosistema dell’innovazione all’interno del quale le startup e le PMI innovative svolgono un ruolo centrale nella capacità di generare valore aggiunto”.
Call for Innovation Augumented Inspection, ecco i profili delle aziende finaliste:
The Tactigon: è una start up innovativa che progetta e produce sensori IoT e wearable dal 2014 e ha due linee di prodotti venduti in Europa e in USA. La prima è Tactigon, ovvero la tecnologia hardware e software di motion capture e gesture recognition con A.I. La seconda è Ruggedaq IoT gateway e sensori per monitoraggio del movimento.
Archon: è una start up innovativa che si occupa di sistemi di intelligenza artificiale per controllare la sicurezza in ambienti industriali, monitorando movimenti e rischi di persone e macchinari, creando un fedele digital twin in tempo reale. L’obiettivo è robotizzare l’ambiente ed eliminare i rischi per l’uomo.
DRB: è una start up innovativa che fornisce soluzioni innovative per l’automazione di servizi operati da droni e automatizza il processo di ispezione e reporting per impianti industriali di generazione e trasporto di energia e infrastrutture.
LinUp: è una start up innovativa che ha creato un sistema integrato hardware e software che consente di introdurre nelle PMI concetti, metodologie e strumenti di analisi del processo produttivo. L’obiettivo è la produzione solo a totale soddisfacimento della richiesta del cliente con zero scorte, zero errori, zero interruzioni del ciclo di lavoro.
Kuaternion: è una startup del Dipartimento di Ingegneria Civile, Edile e Ambientale (DICEA) dell’Università “La Sapienza” di Roma e sviluppa sistemi di monitoraggio geomatico di altissima precisione (inteso come controllo della posizione, dello spostamento, delle velocità e delle accelerazioni) di strutture/infrastrutture strategiche. Si occupa inoltre di rilievo e/o moderazione del territorio e dello sviluppo di algoritmi per la navigazione con sensori GNSS.
Alleantia: è una startup nella top 10 a livello mondiale per l’Industrial IoT ed è partner strategico di Advantech, Cisco e Dell. L’ecosistema 4.0 di Alleantia conta più di 40 aziende, centinaia di installazioni, nel manufacturing, energy, trasporti e le sue soluzioni sono utilizzate da moltissime aziende nei loro progetti di trasformazione digitale, fra cui Brembo, Paglieri, Ansaldo Energia, Cornaglia, TIM, LeonardoCompany.
New Generation Sensors: è una start up innovativa che nasce nel 2015 come spin off della Scuola Superiore Sant’Anna e del CNIT e opera con l’intento di sviluppare prodotti e soluzioni nell’IoT. Ad oggi NGS ha già pronti alcuni prodotti per Predictive Maintenance, Smart Camera e tracker/gateway per la logistica intermodale. NGS inoltre partecipa al progetto HORIZON 2020 ICONET.
ENERSEM: è una start up innovativa e spin-off del Politecnico di Milano, fondata nell’autunno 2016 da professori e ricercatori del Dipartimento Energia e Polihub, l’incubatore del Politecnico di Milano. Essa fornisce servizi basati su modelli software per industrie e società di servizi energetici.
High Performance Analytics: è una start up innovativa e spin-off accreditato dell’Università di Verona, che nasce dalla passione e dall’ingegno di un team di matematici, data scientist e developer per fornire al mercato soluzioni custom per l’analisi predittiva in ogni settore industriale al fine di ottimizzare processi e strategie di business.
Circle Garage: è uno spin-off dell’Istituto Italiano di Tecnologia nata nel 2013 specializzata in (Industrial) Internet of Things, Big Data, Cloud e Realtà virtuale e aumentata. È stata scelta come partner da FCA, Maserati, Magneti Marelli, Edison Energia e Leonardo per lo sviluppo di progetti in ambito industriale, grazie alle alte competenze tecnologiche e lo spiccato orientamento verso l’innovazione e l’affidabilità.
MTM Project: da oltre 10 anni, progetta e sviluppa soluzioni software tailor made, software in Realtà Virtuale (VR) e Machine Learning per facilitare i processi di formazione del personale aziendale, e in Realtà Aumentata per il service e la manutenzione degli impianti industriali, attraverso applicazioni web e desk su smartglass, smartphone, tablet e pc.
221e: è un’azienda attiva nella progettazione, sviluppo e commercializzazione di dispositivi elettronici indossabili e, più in generale, di sistemi integrati per sensoristica applicata e applicazioni IoT.
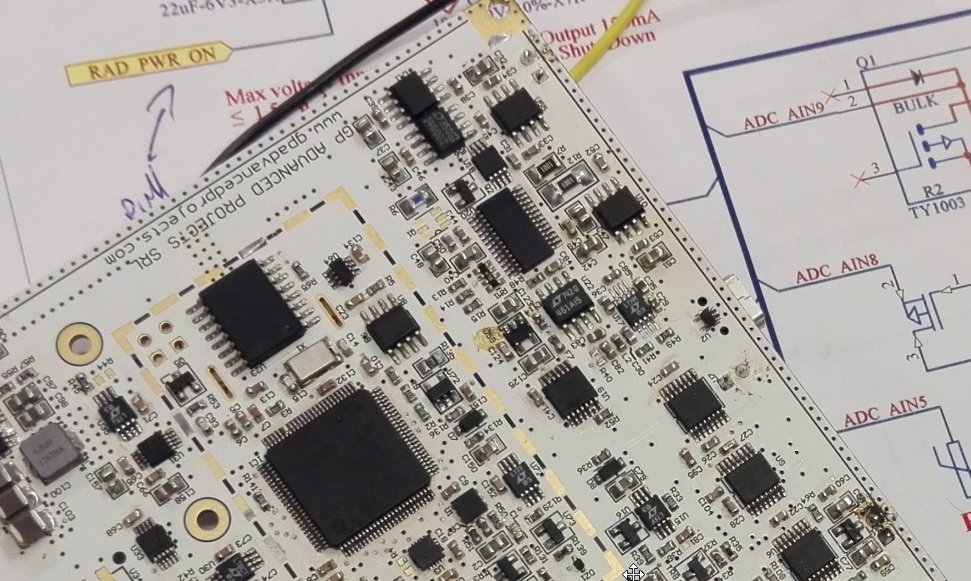
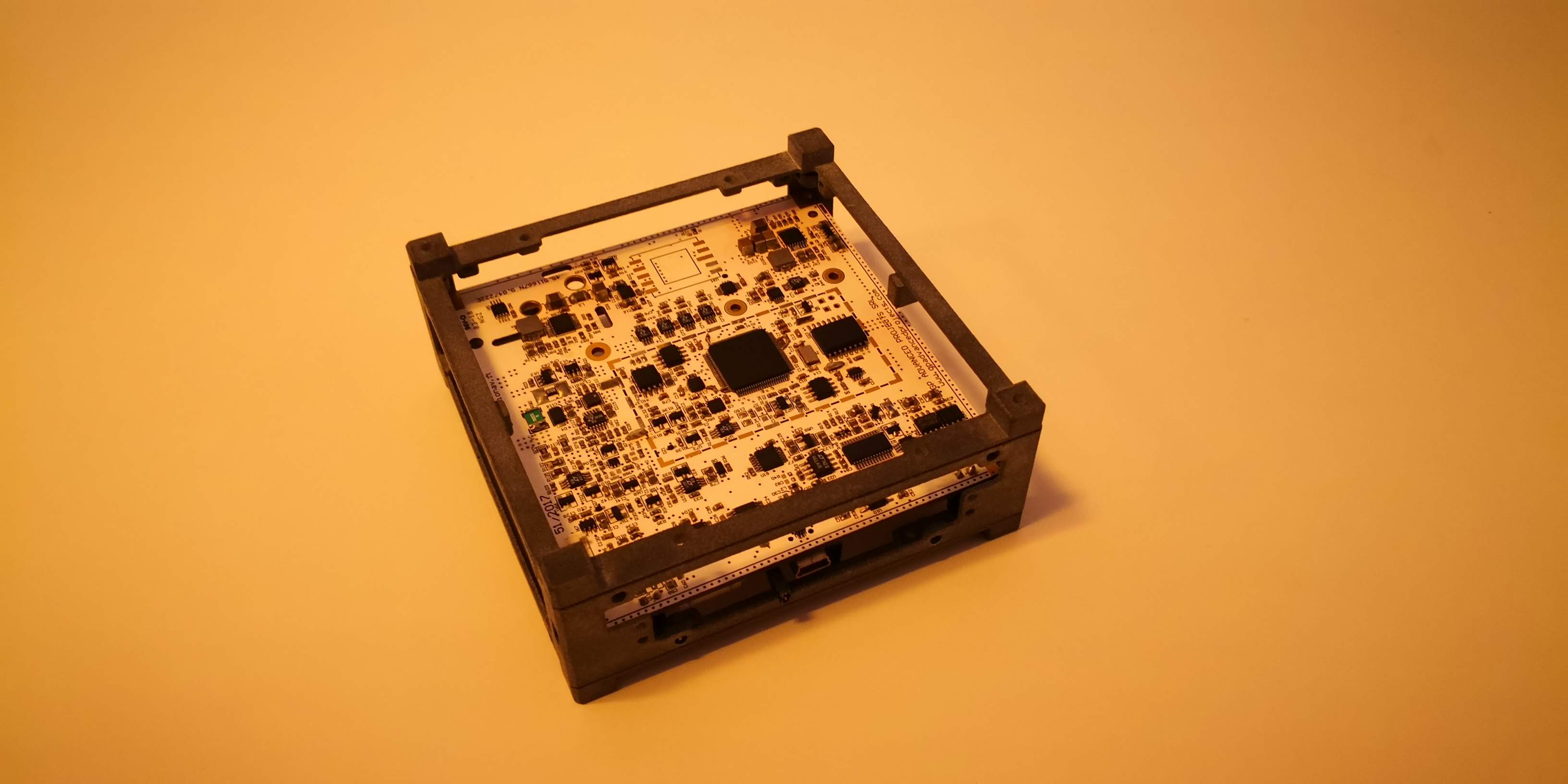
In 2016 Laser Navigation and GP Advanced Projects joined forces to create the first Italian commercial picosat. After more than 3 years of development thanks to the collaboration with, CESI, Linkit srl, Brno University of Technology, and the Polytechnic of Milan, the latter with its teachers and students we have created the first prototype, on which we will soon proceed with the tests needed to validate PicoSat before launch, scheduled for the first quarter of next year. The satellite will be launched on a synchronous orbit passing through the poles, and will make an orbit about every 90 minutes.
The cubesat FEES (Flexible Experimental Embedded Satellite) is based on a STM32F4 micro controller, the chosen operating system is ChibiOS and the development framework is derived from the Ardupilot opensource project, all features of the VR Brain, made by Laser Navigation, which was the board taken as the starting point to build the FEES main board, thanks to the indications and modifications provided by GP Advanced Projects. At the sensor level, it features an IMU that incorporates 3-axis gyroscopes and accelerometers, and a 3-axis magnetometer.
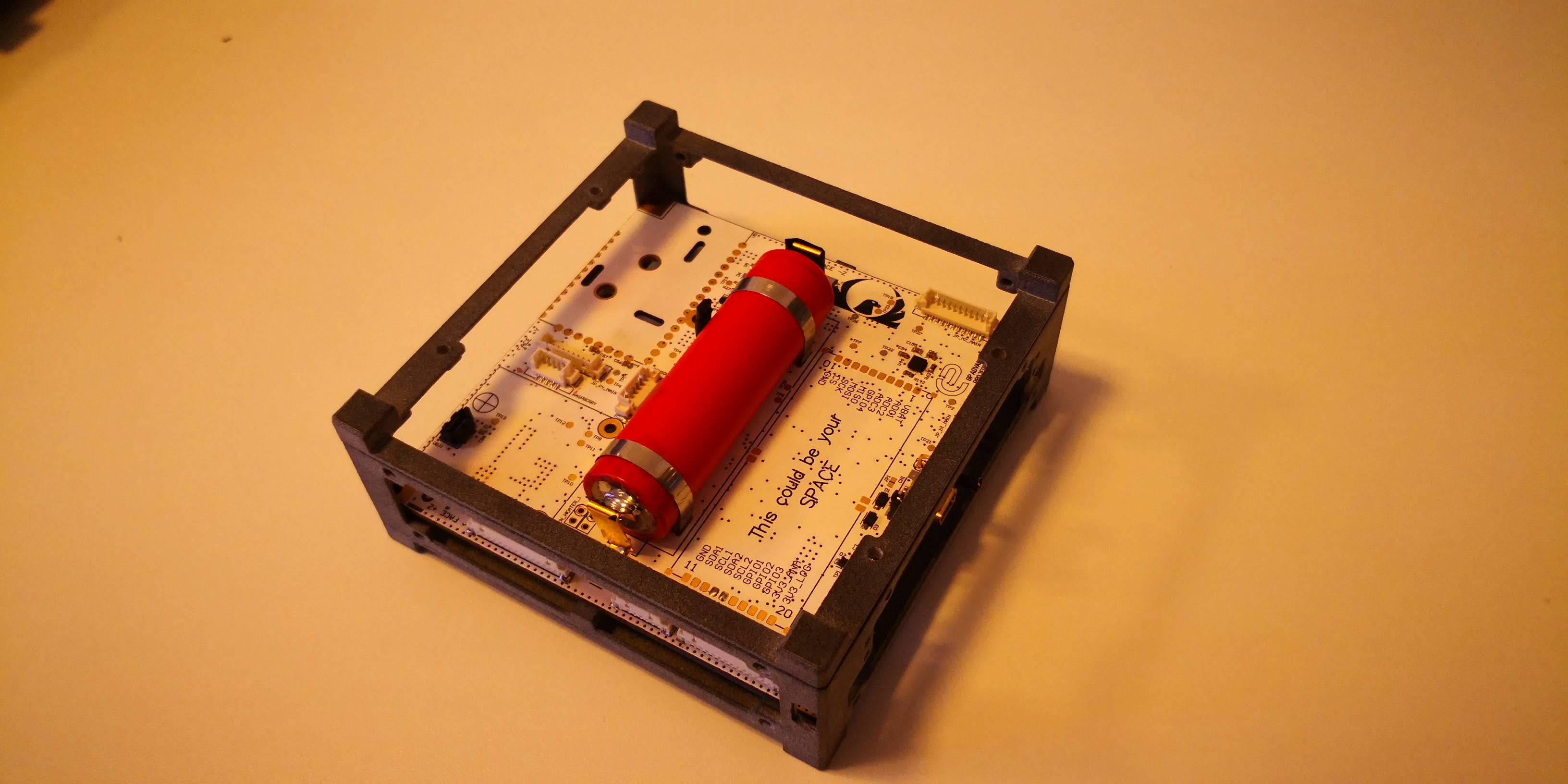
The system has an attitude system based on the use of magnetotorquer, which allow the pointing of the cubesat in the desired direction to optimize both the pointing of the edge antenna and the experimental camera mounted on the same.
The Payloads
The payloads mounted on board are the following:
An experiment (RadEX2) for the detection of the total radiation dose to which the cubesat is subjected during its stay in orbit, developed thanks to Jiří Hofman of Brno University of Technology.
An SDR system based on the Rasperry PI platform, capable of transmitting messages in SSTV and DVB-S format.
A LoRa telemetry system through a specially designed on-board modem, in collaboration with Linkit srl
A system for sending and receiving commands and basic telemetry thanks to short messages exchanged via Iridium satellite communication (to be confirmed based on current regulations)
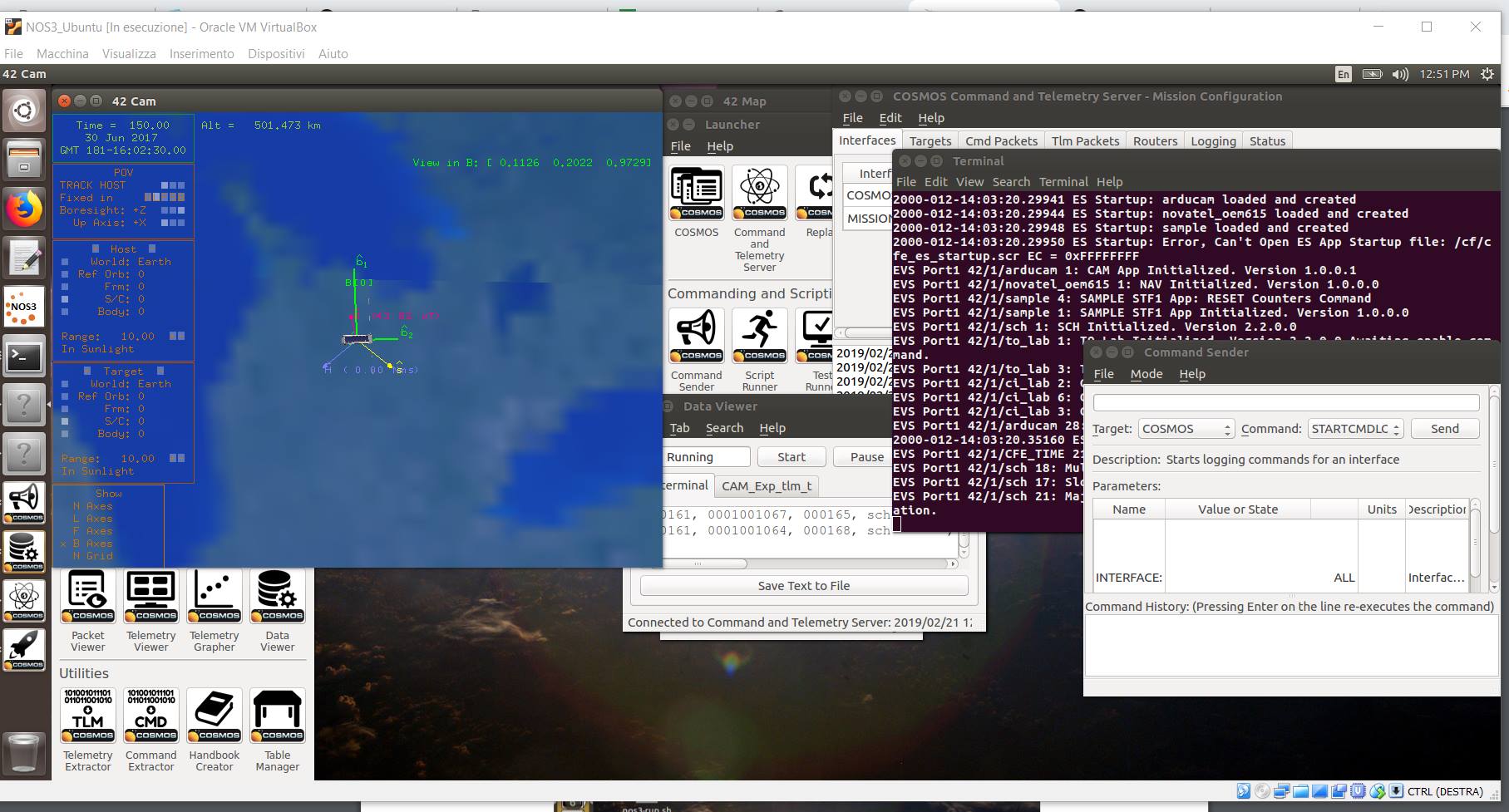
The development of the cubesat firmware is feverishly advancing, given the increasingly narrow margins that bring us closer to the time of launch, even using SITL simulation systems to facilitate satellite debugging in a terrestrial environment.
For the success of the project we are looking for resources to accelerate the writing and debugging of the code that have already had experience in the field of space software development.
Primary Goals :
In-orbit qualification of an attitude (meaning orientation and angular velocity) determination system. WHY? The attitude determination system, together with the control system, is one of the fundamental satellite components, and the basis for a future commercial platform.
In-orbit qualification of commercial GPS receivers. WHY? They are less expensive than space graded receivers, nevertheless allow to know with a reasonable precision the position on orbit. Ideal for nanosatellites.
Usage of the IRIDIUM global satellite network to receive data, supporting traditional radio transmissions. WHY? The IRIDIUM network allows to send/receive data in every part of the world, with a few second delay, without having to be in sight of a ground station, with obvious advantages for early warning needs (TBC).
Development of a ground station network, to receive FEES data. WHY? To download a big amount of data from a nanosatellite it is still necessary to rely on a network of ground stations which guarantees an adequate coverage. Developing it now means that it will be ready to be used by our next satellites.
Secondary Goals:
In-orbit qualification of an attitude control system. WHY? Attitude determination is useful, but even more is to use this information for attitude control, by using actuators and by following clear goals, such as to point toward the sun to recharge the batteries, or to point toward the ground to take pictures.
Testing of various transmission protocols by using Software Defined Radio (SDR) digital technology.WHY? By having a specific transceiver on board it is possible to modulate the signals in order to obtain different advantages, such as a longer transmission distance, or a higher download data rate. This will allow to identify the best solution for future missions needs. In this task FEES is supported by the radio-amateur and developer community.
To take picture by using a mini camera. WHY? Miniaturization allows to have on board a camera which sees in the visible spectrum, taking pictures which can be used for Earth imaging, but also to take pictures of the stars to determine satellite position with appropriate algorithms.
A platform for the Makers and radio amateur Community
Thanks to the Raspberry Pi based SDR, the satellite is a platform to experiment transmission protocols which are still not tested in space applications. The flexibility of the RPI solution allows the community to code the experiments in a familiar environment paving the way for the execution of very different test during the satellite lifetime.
Thanks to Ardupilot community we open a new space opportunity to open source flight control board after great success in drone development did in last 10 years.
Who’s behind F.E.E.S.
GP Advanced Projects srl has a strong know how in space systems and infrastructures, but also in system engineering and project management activities in general. In addition, the company has a proven experience in dealing with European companies, institutions, research bodies and space agencies, both European and non-European, and with launch providers.
The management responsibility of the FEES project belongs to GP Advanced Projects.
Laser Navigation srl is a company with a proven background of electronic devices design and development, in particular in the Unmanned Aerial Vehicle (drones) sector, where it develops autopilots and control systems. In additions Laser Navigation has a strong know-how in telecommunications and radiofrequency applications. Laser Navigations is in charge of the whole FEES electronics.
Politecnico di Milano is key actor in space activities, thanks to its participation to some of the most important European and non-European missions. Politecnico di Milano support FEES in analysis and design activities.
CESI is a European leader in the production of solar panel for space application. CESI provides the photovoltaic cells which generates the energy that FEES needs.
It is in charge of FEES TT&C module and ground station design.
The Brno University of Technology, and in particular the Faculty of Electrical Engineering and Communication, is in charge of designing the satellite radiation monitor.
Furthermore the FEES development is supported by the radio-amateur community for the Software Defined Radio (SDR) development and the ground station support.
Thanks to : Guido Parrisenti for the original idea , Stefano Ampolo and Luca Micheletti , for video animation and FEES coding , Diego Ambroggi for schematics and PCB design.
FEES. needs
The FEES projects is completely self-financed. The launch has already been purchased and launch date scheduled.
To mitigate internal development cost and to increase the mission success probability, GP Advanced Projects is looking for companies and institutions willing to sponsor FEES, or to participate to the projects in various ways.
More detail about public github with detailed board information and firmware well be available in the next weeks.
Best
Roberto Navoni
Our presentation start a 1.23 min.
Yesterday in Turin, Italy, at the Automation & Testing Fair was presented the Inspection robot for underground hydro tunnel developed by Laser Navigation for IREN SPA . The robot built by our company allows to inspect tunnels with a length up to 8 km. The robot is equipped with 360-degree Lidar sensors,8K Spherical cameras, navigation cameras and LED lighting with high intensity, able to allow an assisted navigation to the remote operator and a complete and complex inspection of the entire tunnel. 3D model photographic level. The Robot is also equipped with a communication network that is automatically transported and stored in order to guarantee communication between the ground station and the robot during the entire activity. The communication network consists of 12 devices equipped with auto pointing antennas that construct a 5Ghz hyperlan network that provides a 10 mbits band. The entire system has been patented.
video example of radio deploiment.
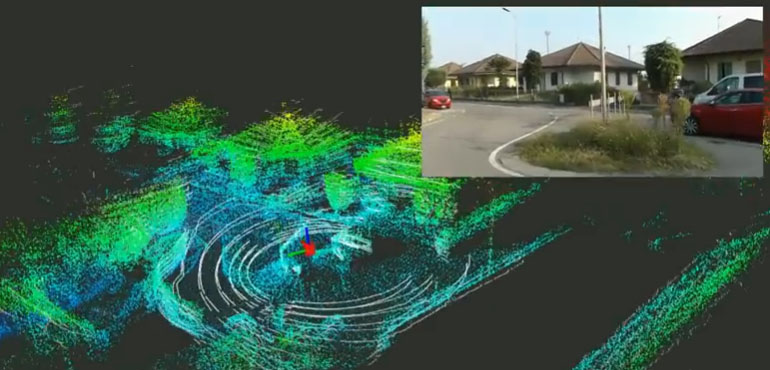
In this video you can see a prototype of our experimental drone set up with a companion computer and an advanced lidar system during the checks of the anti-collision system that working simultaneously with the localization and mapping algorithms allows the drone to avoid obstacles during autonomous flight .In the last 5 years in the Laser Lab, localization, mapping and anti-collision algorithms have been developed, using 2D and 3D type lidar.In this first part of the post we will focus on algorithms using a 2D lidar and a 2D SLAM navigation algorithm.
The videos of the playlist are made using:
Custom Drones.
VR Brain 5.2.
Companion Computer with the ROS operating system installed and our algorithms for calculating position and mapping in real time to build the map of the navigation area.
The outputs of the navigation system are:
Metric coordinates X, Y with the starting point set at the point of ignition of the system.
Angle representing the direction of the robot’s or drone’s bow.
Map of occupation of the navigation area reconstructed in real time in 2D, the height is given by the height value returned from the barometer of VR Brain 5.2
In the following video we tested the SLAM algorithms in the corridors and the offices of our laboratories , the quality , accuracy and repetition of the location was reliable and allows to implement excellent autonomous navigation algorithms without GPS and with anti collision, as we will show in the following examples.
After the excellent results obtained in the ground tests we carried out the tests in flight by installing the localization system on board of our drone injecting the location data instead of the signal normally sent to the VR Brain 5.2 from the GPS, in addition to the position signal provided from the on-board computer we have also interposed the heading direction data generated by the navigation algorithm to the autopilot in place of the data provided by the magnetometer. The magnetometer has been replaced because in indoor areas the perturbation of the magnetic field is such as to compromise the navigation system making it unstable.
In the video you can appreciate the quality and accuracy of the location, the accuracy of the heading direction and the low latency of the calculation algorithms for localization and mapping.
The height data is given by the barometer and recurrent by the on-board accelerometers of the VR Brain 5.2.
In the next video we see an example of the flight telemetry of an autonomous mission inside a boiler, the environment is a metallic environment where the position could not be provided through a traditional GPS, the only possible option it was set up a drone able to navigate autonomously thanks to the help of a system of localization and mapping based on a laser system.
Now a couple of examples of application , the first flight was a video inspection on a vertical wall , the flight planning did on the ground station sent to the drone and the flight did independently without pilot.
On the next flight, instead, an example of a horizontal inspection flight.
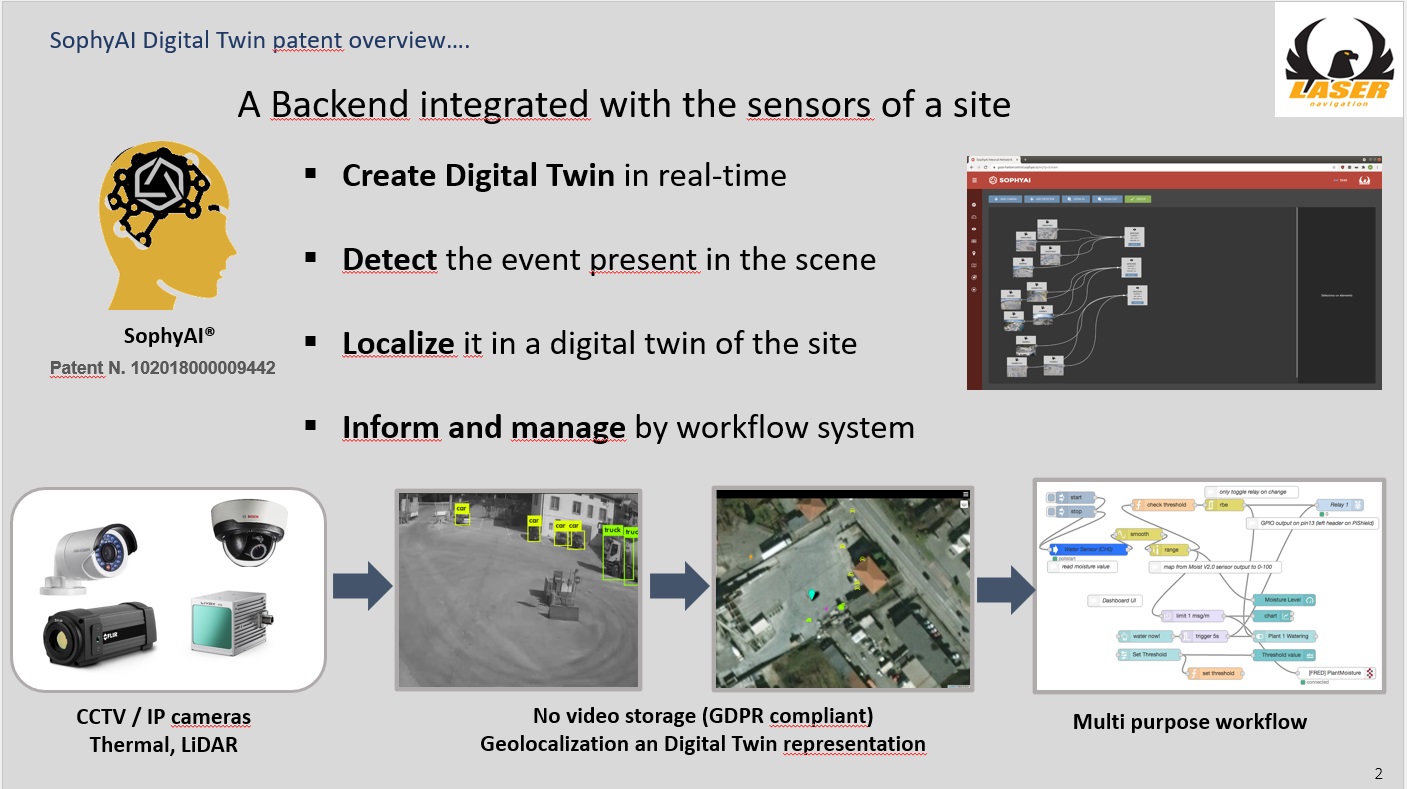
 SophyAI Digital Twins
SophyAI Digital Twins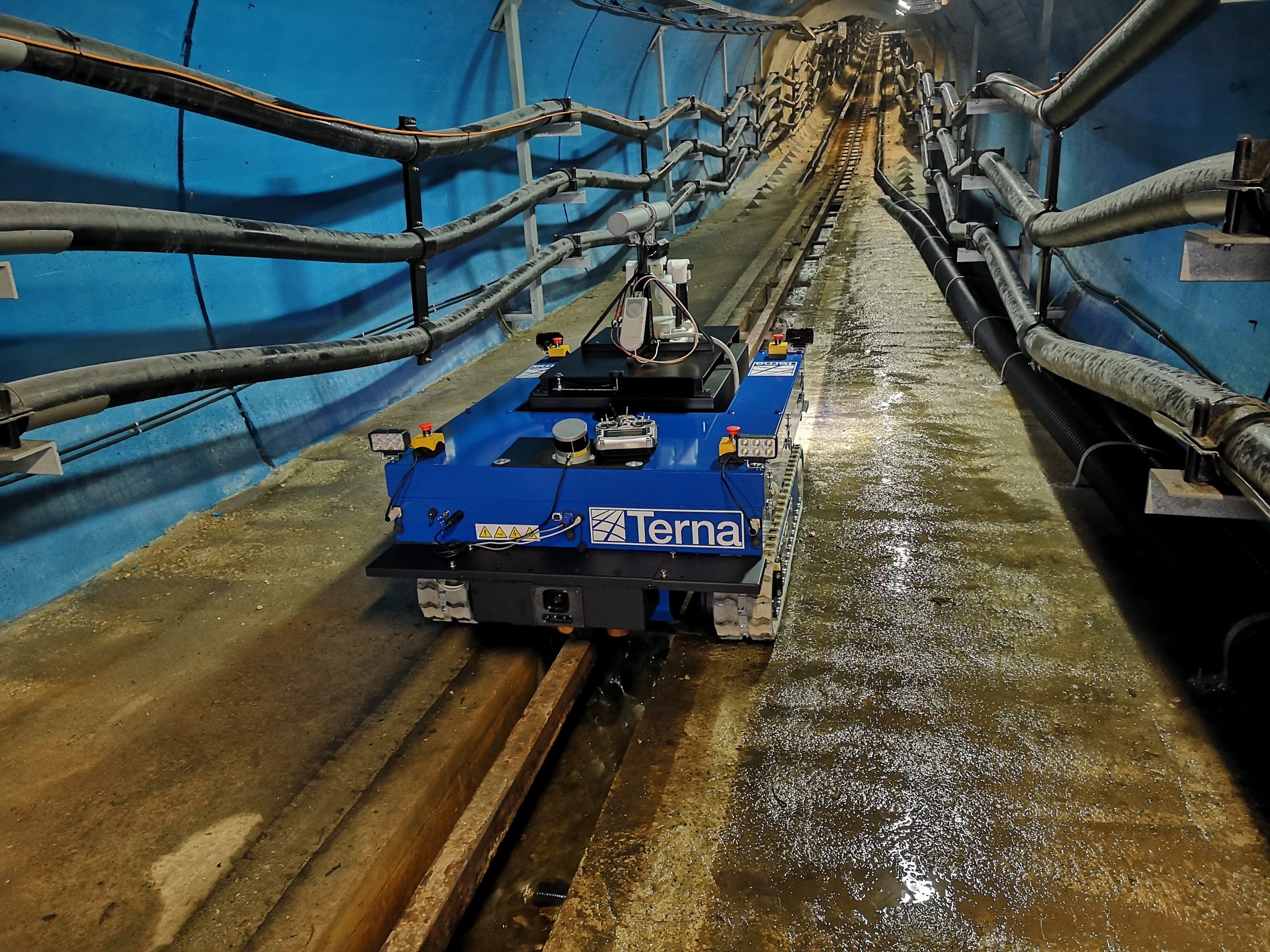 VR ROVER 5.0 PRO
VR ROVER 5.0 PRO VR TRACTOR 5.0
VR TRACTOR 5.0 VR AXEL ROVER
VR AXEL ROVER SophyAI Mobile Anti Collision System
SophyAI Mobile Anti Collision System Autonomous Robot Buoy
Autonomous Robot Buoy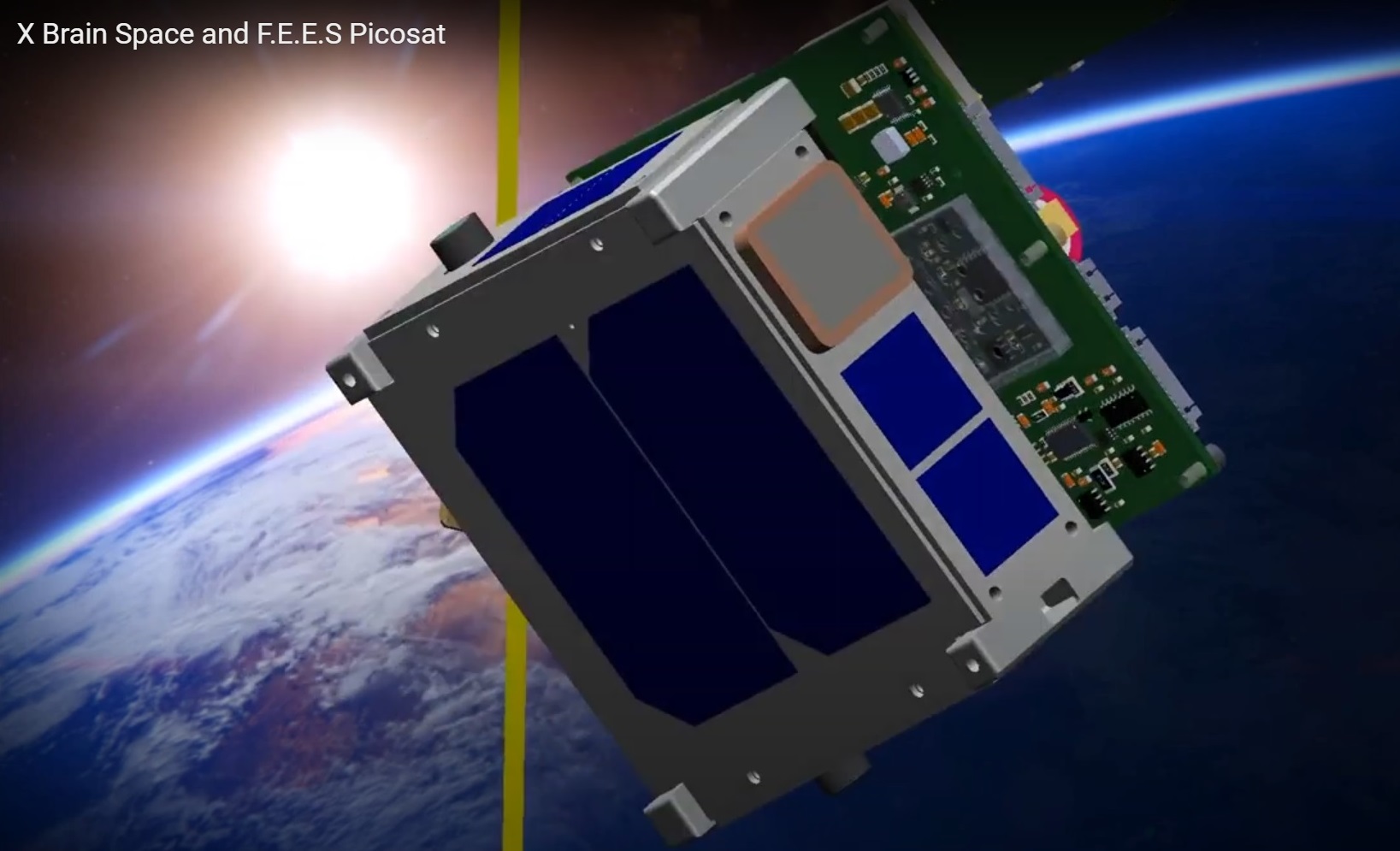 SophyAI Space
SophyAI Space
 The NVIDIA Jetson edge AI platform is present in all our robotic realizations and is the core elaboration system of our SophyAI® A.I. platform.
The NVIDIA Jetson edge AI platform is present in all our robotic realizations and is the core elaboration system of our SophyAI® A.I. platform.